欢迎光临~深圳泰科特科技有限公司
语言选择:



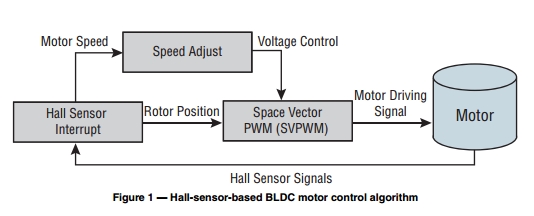
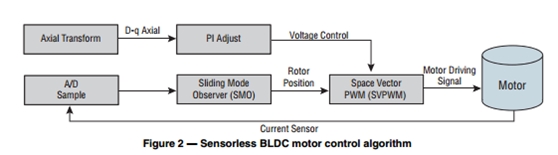
To control a BLDC motor requires information about the rotor position and speed. Getting this information from three Hall sensors (or encoders) on the motor shaft is straightforward. Each Hall sensor outputs a high level for 180° of an electrical rotation, and a low level for the other 180°. The three sensors have a 60° relative offset from each other. This arrangement divides a rotation into six phases (3-bit code). The microcontroller reads the 3-bit code and determines the position of the rotor (Figure 1). Commutation in the right direction is calculated by reading consecutive Hall sensor positions. Though Hall sensors simplify BLDC motor control, they add cost as well as extra wires to the motor that are susceptible to corrosion and can act as a source of EMI. Hence, many applications are moving away from sensor-based control to senseless solution( Figure 2). The most popular sensorless method for detecting rotor position is to measure the back-EMF in the no conducting phase of the BLDC motor winding. Using this measurement to calculate the zero crossing of each phase is CPU intensive and thus requires a higher performance microcontroller than is needed for the sensor-based method. However, the necessary performance is readily available from today’s microcontrollers and is widely useful in products for improving overall efficiency and implementing product features such as a sophisticated user interface.
Tecote Company Limited, as the leading designer and manufacturer of BLDC control driver, on base of very good understanding of BLDC technology from MCU to application level, adopting hall-senseless ,FOC(field-oriented control), sinusoidal technology, we developed a series (TC-LFXXX)of driver which works with BLDC motor very well.
联系人:王小姐
手机:+86 17727920147
电话:+86 (0)755 21017515
邮箱:info@tecote.com
地址: 深圳市龙华区大浪街道华旺路163号ICC PARK A栋305